
AI浪潮下,大模型上車的競賽也悄然打響。
近日,在電動汽車百人會論壇上,小鵬汽車董事長何小鵬表示,今年第二季度,小鵬汽車將實現AI大模型上車,「更接近人類的真實駕駛,可以很大程度提升智駕擬人感和開發效率。」
此前,AI大模型上車的例子不在少數,比如理想汽車的大模型算法MindGPT;百度Apollo和長城汽車、億咖通科技合作,探索文心大模型智艙應用等。
「AI+汽車」也是當下最主流的探索方向,AI大模型除了在智能座艙領域有成功的應用外,在自動駕駛領域也有廣闊的應用前景。
中國自動駕駛開發平台的底層技術原理是什麽?哪些關鍵技術是促進自動駕駛開發平台成型的核心因素?
01 自動駕駛開發平台行業綜述
自動駕駛開發平台為企業提供雲端開發工具集,目的是高效、低成本地加速技術研發、部署與運營,集成數據管理與高級仿真功能,確保系統性能與安全。
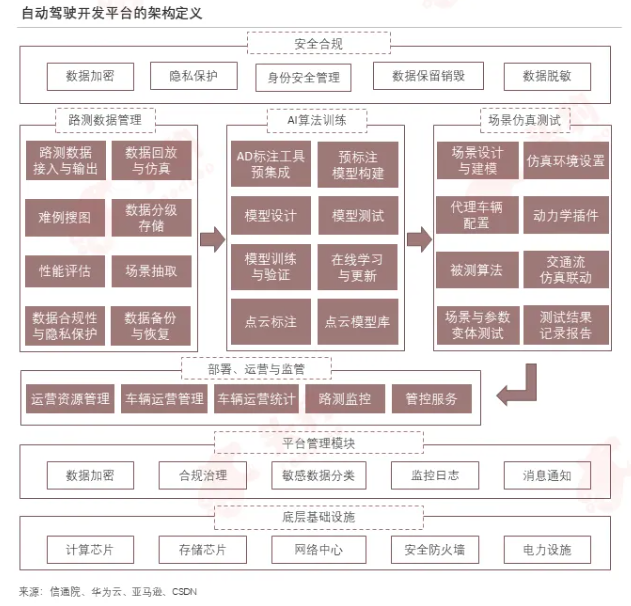
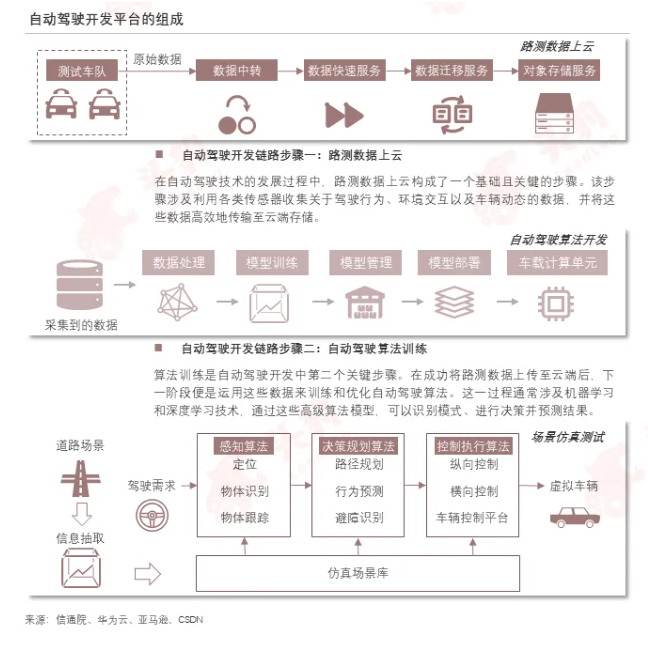
自動駕駛開發的核心鏈路包括:首先,傳感器採集的路測數據上傳雲端;接著,使用這些數據訓練自動駕駛算法;最後,進行場景仿真以測試和確保算法在各種環境下的性能和安全性。
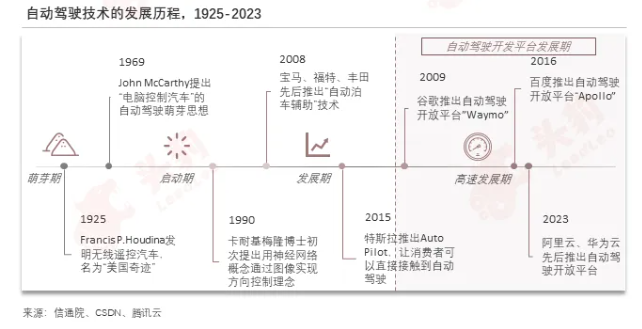
自動駕駛技術經歷了從概念孕育到實驗性研究的階段,並逐步引入了人工智能技術實現自主導航。目前,自動駕駛技術由於其復雜性和規模性進入開發平台發展期,通過整合工具鏈助力自動駕駛應用的擴展。
2022年,中國自動駕駛開發平台市場規模達到5.2億元。隨著自動駕駛技術的普及率顯著增長,自動駕駛開發平台成為提升研發效率和安全性的關鍵工具,市場規模將會以52%的年復合增速進入高速增長期。
02 自動駕駛開發平台產業鏈洞察
自動駕駛開發平台產業鏈上遊由雲計算服務、數據服務、高精度地圖服務、仿真服務以及算法生態相關各類企業組成;中遊為各類自動駕駛開發平台開發廠商;下遊為自動駕駛開發平台服務的各類企業。

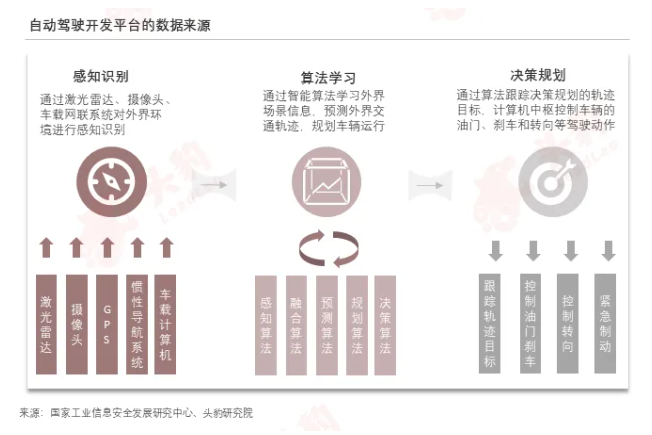
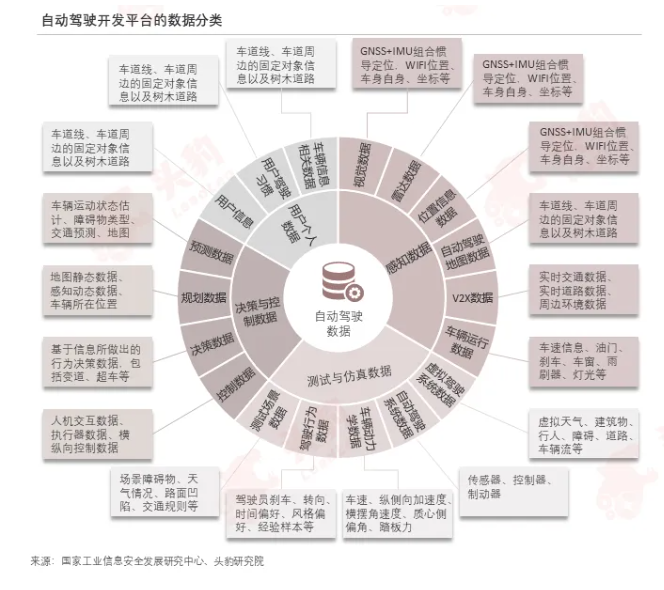
感知、計算和決策執行構成了自動駕駛的三個主要工作流程。這些過程產生的核心數據對於系統的持續優化至關重要。對這些數據準確地實現數據提起、轉換以及加載是實現自動駕駛數據向技術轉變的關鍵。
自動駕駛數據分為感知數據、測試與仿真數據、決策與控制數據以及用戶個人數據四個類别,同時具備數據多樣性、數據規模性、數據非結構性、數據流動性以及數據涉密性的五大顯著特點。
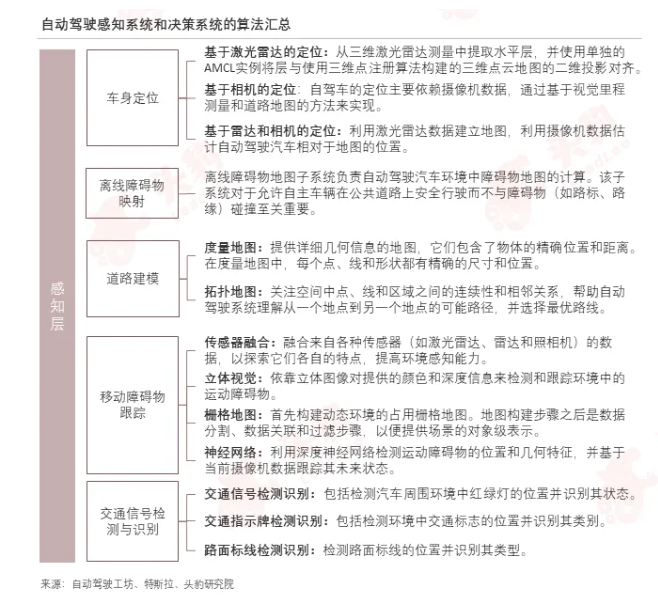
自動駕駛的感知層算法主要涉及車身定位和識别。信息收集主要通過激光雷達、相機或二者的組合實現。激光雷達因高精度被用於建圖,而相機輔助定位以降低成本,雖然其精確度和可靠性略遜於激光雷達。
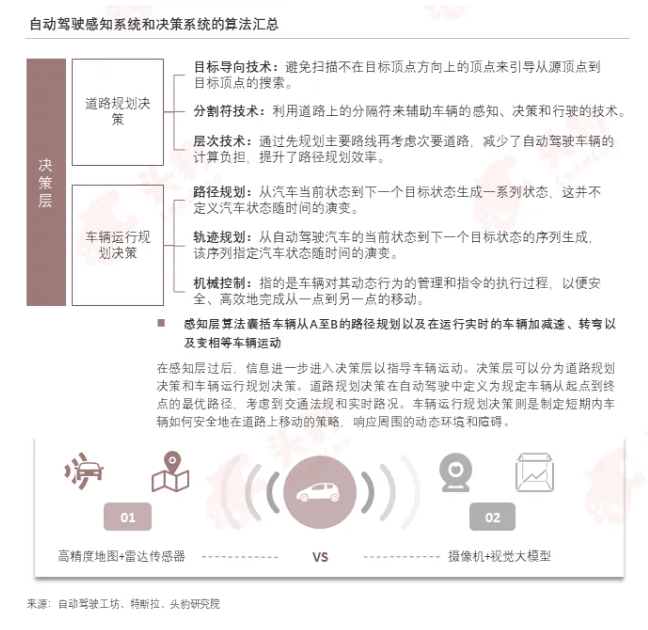
自動駕駛的決策層算法可以分為道路規劃決策和車輛運行規劃決策。前者規定車輛從起點到終點的最優路徑,後者則是制定短期内車輛如何安全地在道路上移動。兩者協同實現地點A至B的車輛自動駕駛。
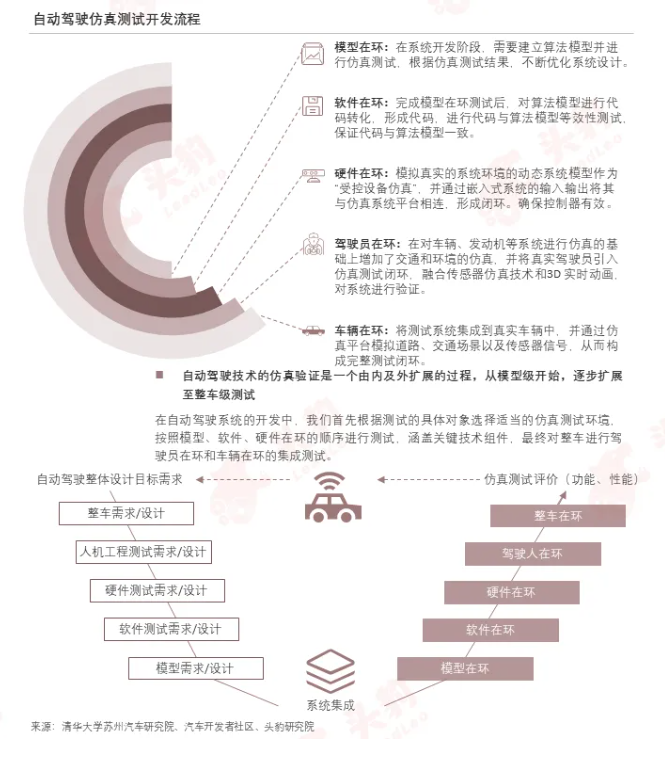
傳統的道路測試車隊在應對復雜場景和開發需求時,面臨著高昂的人力和財力成本問題。通過仿真測試得以顯著降低,使開發者能在實際路測前有效評估車輛在多樣交通狀況下的性能。

在自動駕駛系統開發中,仿真測試從模型級到整車級逐步擴展,遵循模型、軟件、硬件在環的順序,覆蓋關鍵技術組件,並以駕駛員在環和車輛在環的集成測試作為最終驗證步驟。
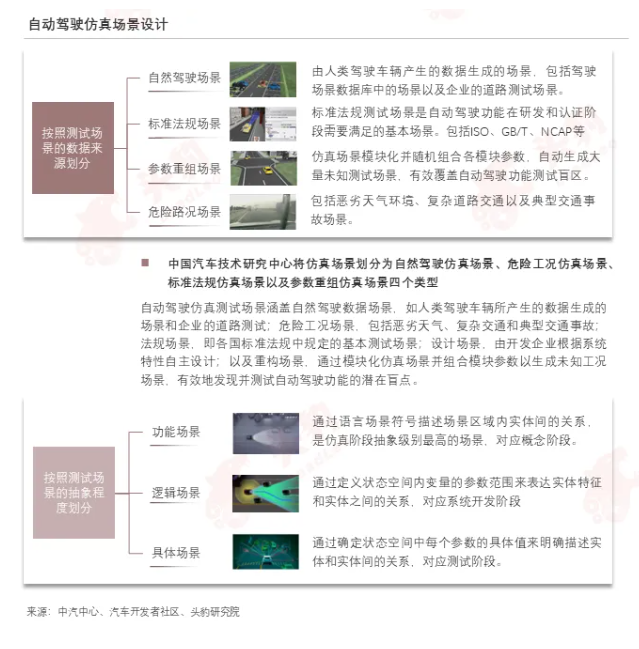
自動駕駛的仿真場景可分為自然駕駛、危險工況、標準法規測試以及參數重組四大類,每一類都從抽象概念逐步發展到具體應用,所需的場景數據也在不斷增加以滿足從設計到實施的各個階段的測試需求。
自動駕駛開發平台的核心參與者主要由具備雲計算基礎能力的科技互聯網企業組成。這類企業憑借其雲計算基礎設施能力和豐富自動駕駛資源,為自動駕駛企業提供靈活高效的全鏈路自動駕駛開發場景。

自動駕駛開發平台服務於各類對自動駕駛技術開發有需求的企業。從對開發需求以及對計算存儲服務的依賴度歸納,可將自動駕駛企業分為四個梯隊。整車廠以及造車新勢力對平台的依賴度最高。
03 自動駕駛開發平台發展探析
中國正積極推進自動駕駛政策的發展,強化車輛生產準入管理,確保測繪地理信息的合規採集和使用,為自動駕駛車輛的運輸服務和數據治理設立指南與細則。促進智能網聯汽車產業的有序發展和技術進步。

自動駕駛開發平台的未來主要聚焦於五大核心趨勢,包括數據採集智能化、數據標注高性價比化、雲端並行仿真測試、工具鏈端到端整合,以及開發工具鏈模塊解耦。

財華網所刊載內容之知識產權為財華網及相關權利人專屬所有或持有。未經許可,禁止進行轉載、摘編、複製及建立鏡像等任何使用。
如有意願轉載,請發郵件至content@finet.com.hk,獲得書面確認及授權後,方可轉載。
更多精彩內容,請登陸
財華香港網 (https://www.finethk.com/)
財華智庫網(https://www.finet.com.cn)![]()
現代電視 (https://www.fintv.hk)
 財華財經APP下載
財華財經APP下載  或
或 按钮分享
按钮分享